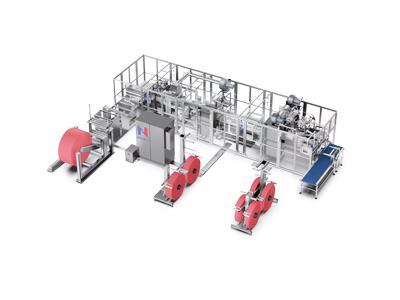

تعتمد آلة التعبئة والتحميل الأوتوماتيكية للأسمنت المعبأ في أكياس من شركة Gachn على تقنية المسح ثلاثي الأبعاد، والتي يمكنها تحديد موقع ومسح الشكل الخارجي للمركبة بدقة لتحقيق هدف تحديد موضع التحميل بدقة، والتشابك التفاعلي بين نظام التحميل وآلة التعبئة والتغليف، والتحميل التلقائي.
اسم المنتج :
Bagged Cement Palletizing And Loading Machineرقم الصنف :
FK008-IIالطلب (الحد الأدنى للكمية) :
1قسط :
30% advance payment, 70% balance before shipment or negotiableمنشأ المنتج :
xiamen,chinaميناء الشحن :
XIAMEN or Or according to your needsمهلة :
3 monthsآلة تعبئة وتحميل أكياس الأسمنت على منصات نقالة
كانت عملية تعبئة الأسمنت في أكياس في الأصل تُنقل من المصنع في الغالب يدويًا أو باستخدام معدات تحميل شبه آلية، وكان استلام المواد يتطلب عمالة يدوية. ومع نقص العمالة وارتفاع تكاليفها، باتت الشركات بحاجة إلى أنظمة تحميل آلية بالكامل لتحل محل العمالة اليدوية وتوفير التكاليف. وأثناء عملية تعبئة الأسمنت، يتعرض العمال لبيئة مليئة بالغبار، مما يزيد من احتمالية الإصابة بأمراض مهنية مثل داء الرئة الغباري.

يُعدّ جهاز التحميل الآلي تطبيقًا عمليًا لذراع الروبوت في نظام تعبئة أكياس الأسمنت. يتميز هذا الذراع بتحكم دقيق، مما يُحسّن الكفاءة، ويُقلّل من الجهد المبذول، ويُحسّن بيئة العمل، ويُخفّض استهلاك الطاقة. وقد ساهم استخدامه في تحرير العمالة ولعب دورًا هامًا في تطوير الصناعة. يُمكن لجهاز التحميل الآلي بالكامل التكيف مع أنواع مختلفة من المركبات والتحميل التلقائي. يستخدم نظام التعرف فيه تقنية الليزر والمسح ثلاثي الأبعاد للحصول على معلومات المركبة، بينما يحصل نظام تحديد المواقع على معلومات موقع المركبة من خلال مستشعرات ليزر متعددة. يجمع الروبوت هذه المعلومات لالتقاط أكياس الأسمنت، وتخطيطها، وتعبئتها تلقائيًا.
مبدأ عملوكيل نظام التحميل الآلي لأكياس الأسمنت رافعة أسمنت من شركة Gachn gourp
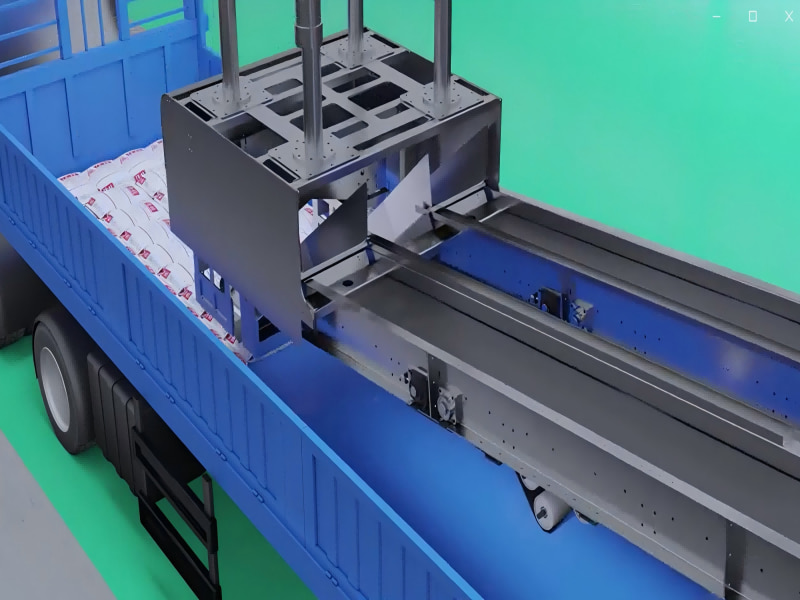
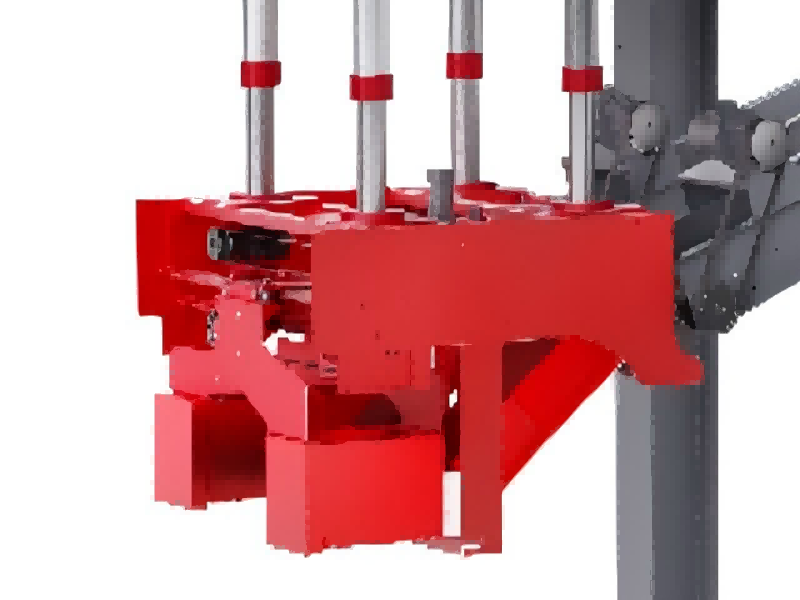
تعتمد آلة التعبئة والتغليف الأوتوماتيكية للأسمنت المعبأ في أكياس، من إنتاج مصنع Gachn، على تقنية المسح ثلاثي الأبعاد، التي تُمكّن من تحديد موقع المركبة بدقة ومسح شكلها الخارجي، ما يُحقق دقة عالية في موضع التحميل، وتكاملًا تفاعليًا بين نظام التحميل وآلة التعبئة والتغليف، وتحميلًا أوتوماتيكيًا. ويعود سبب قدرة آلة Gachn على الحركة بحرية في المساحات الصغيرة إلى استخدامها رافعة مزودة بآلية تلسكوبية ثلاثية الأبعاد، ما يُتيح التحكم في نمذجة وتشغيل آليات المحاور X وY وZ بتناسق تام.
نظام إزالة الغبار
نظام تحميل أكياس الأسمنت الأوتوماتيكي من شركة جالير جاسشن مزود بنظام شفط غبار يتكون من غطاء شفط الغبار، وخط أنابيب شفط الغبار، وجهاز شفط الغبار، مما يُحسّن بشكل كبير من كمية الغبار المتطاير أثناء عملية التحميل. معظم مصانع الأسمنت لديها أنظمة شفط غبار جاهزة، ولا تحتاج إلا لتعديل خطوط الأنابيب قبل الاستخدام.
يمكن لجهاز تجميع الغبار معالجة حجم هواء يصل إلى: 100000 متر مكعب/ساعة

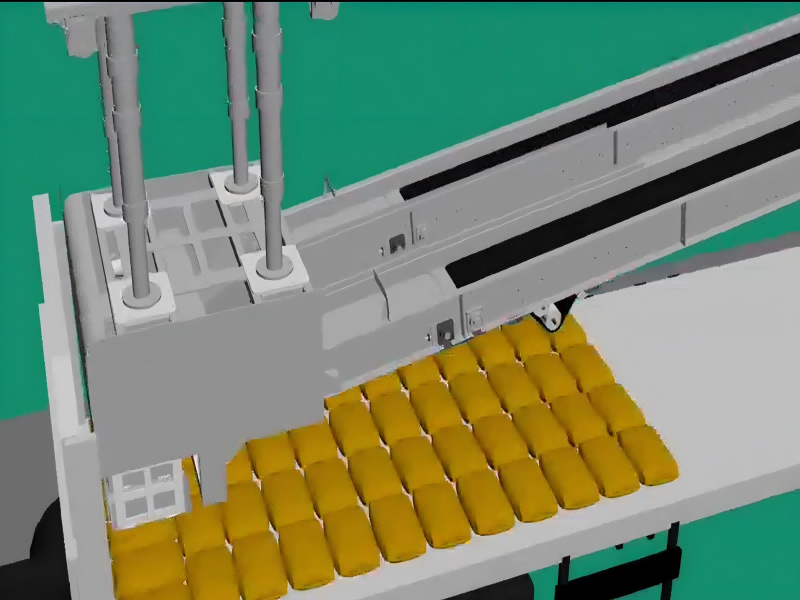
يمكن لآلة التحميل الأوتوماتيكية للأسمنت من شركة Gachn Gourp إتمام عملية التعبئة والتغليف
1. مواد التحميل: أسمنت معبأ في أكياس
2. مواصفات الأسمنت المعبأ في أكياس: 50 كجم/كيس، 650 مم (طول) × 400 مم (عرض) × 140 مم (سُمك)
3. سرعة تعبئة الأكياس في آلة التعبئة: 120 طن/ساعة
4. سعة التحميل الآلي: ≥90 طن/ساعة
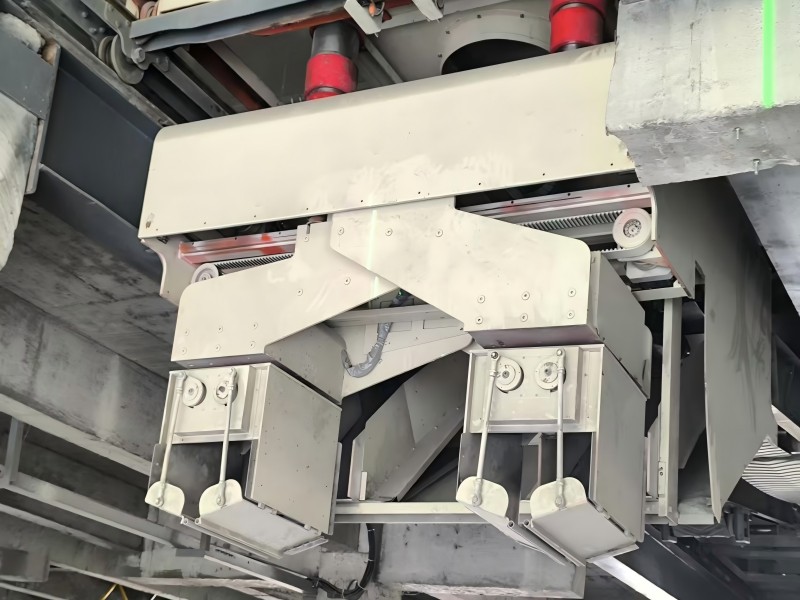
تحميل المضيف
تتألف آلية تجميع الغبار في مقدمة الرافعة الروبوتية من آلية تثبيت أنبوب تلسكوبي، وقناة تهوية تلسكوبية، وحوض لتجميع الغبار، وقناة تهوية رأسية لتجميع الغبار، وغيرها من الآليات. تدخل قناة تجميع الغبار الرأسية ومقدمة العربة بالكامل إلى حجرة التحميل، مما يضمن تجميع الغبار بسرعة ودون إحداث أي غبار.
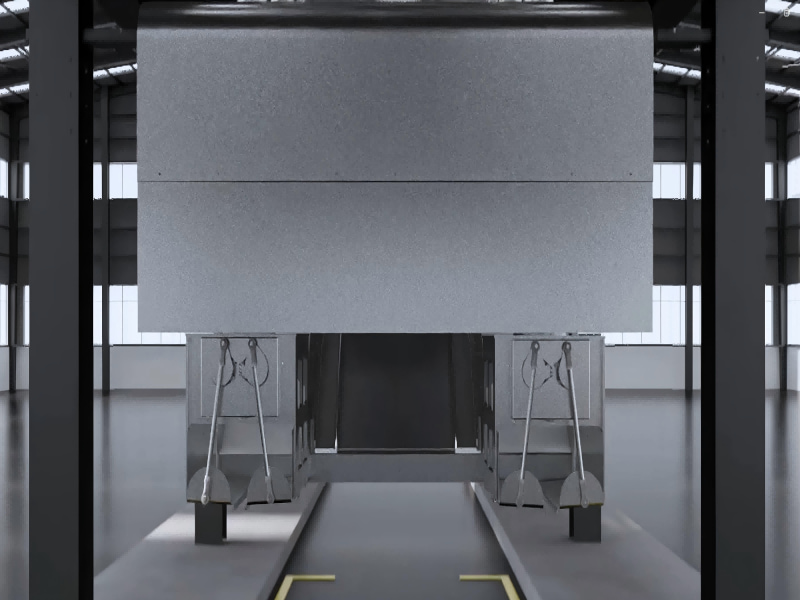
نظام مسح المركبات (المسح ثلاثي الأبعاد)
لا يقتصر نظام مسح المركبات (المسح ثلاثي الأبعاد) من Gachn gourp loader على مسح وتحديد هيكل المركبة فحسب، بل يشمل أيضًا مسح خزان الوقود عند حاجز المقصورة الأمامية والخيام الملفوفة لبعض المركبات. كما يمكنه تحديد المقصورات المزودة بقضبان ربط. ومن خلال حسابات النظام الداخلية، يتم إنشاء التخطيط المناسب للمقصورات المراد تعبئتها، مما يحقق الغرض من الحساب التلقائي للتحميل الثانوي.
مجموعة لوحة التحكم والمستشعر:
تتضمن مجموعة لوحة تحكم اللودر الآلي وأجهزة الاستشعار بشكل أساسي لوحة تحكم الحركة المزودة بشاشة عرض LED، ولوحة تحكم التشغيل التي تعمل باللمس مع إعادة ضبط تلقائية/يدوية، ونظام عرض مدمج لفك تشفير الفيديو، ونظام صوت، وكاميرا رقمية عالية الدقة متصلة بالشبكة، وكابل خاص بالروبوت، وأجهزة استشعار (جهاز كشف مستمر لتحديد هوية الطرود، وجهاز كشف دخول الطرود، وجهاز كشف الطرود الفرعية، وجهاز كشف الموقع)، ونظام تبريد تلقائي للوحة التحكم، ومكونات أخرى. يُحقق هذا النظام التكامل بين العمل الميداني والسحابي، كما يُتيح إنشاء منصة ذكية للودر وشبكة الجيل الخامس مشاركة النظام وإدارته الهرمية، مما يوفر الظروف اللازمة للبناء الذكي لمصانع الأسمنت.
برامج النظام:
ينقسم برنامج النظام بشكل أساسي إلى برنامج النظام المتكامل وبرنامج تمرير البطاقات، ويحقق الغرض من النمذجة الذكية وخوارزمية الحركة التكيفية.
يتألف نظام البرمجيات المتكامل للرافعة الروبوتية من برمجيات المسح الضوئي، وبرمجيات القيادة، وبرمجيات التحكم الآلي في مستشعرات الرفع، وبرمجيات التحكم الآلي في النقل، وبرمجيات التحكم في نظام الرافعة الذكية، وبرمجيات التحكم الأساسية، وبرمجيات التحكم الآلي في الرافعة، بالإضافة إلى أنظمة برمجية أخرى. يعتمد نظام البرمجيات على برمجيات التحكم الأساسية وبرمجيات القيادة، ويتعاون لإتمام عمليات مسح معلومات صندوق المركبة (بما في ذلك الشد)، والرفع على المحور Z، والحركة على المحورين X وY، والناقل الحزامي، والتحميل الذكي، وغيرها.
ينقسم برنامج تمرير البطاقات في جهاز التحميل الآلي إلى برنامج تمرير البطاقات وبرنامج تمرير بطاقات التعريف، ويُستخدمان معًا. عند تمرير البطاقة مرتين بنجاح، يقوم الحاسوب الداخلي بتحويل وزن الحمولة إلى عدد الأكياس المحملة، ثم تُنقل معلومات عدد الأكياس إلى وحدة التحكم الرئيسية في جهاز التحميل الآلي عبر النظام البرمجي. عندئذٍ، يُصدر الروبوت تعليمات دقيقة بكمية التحميل المناسبة.
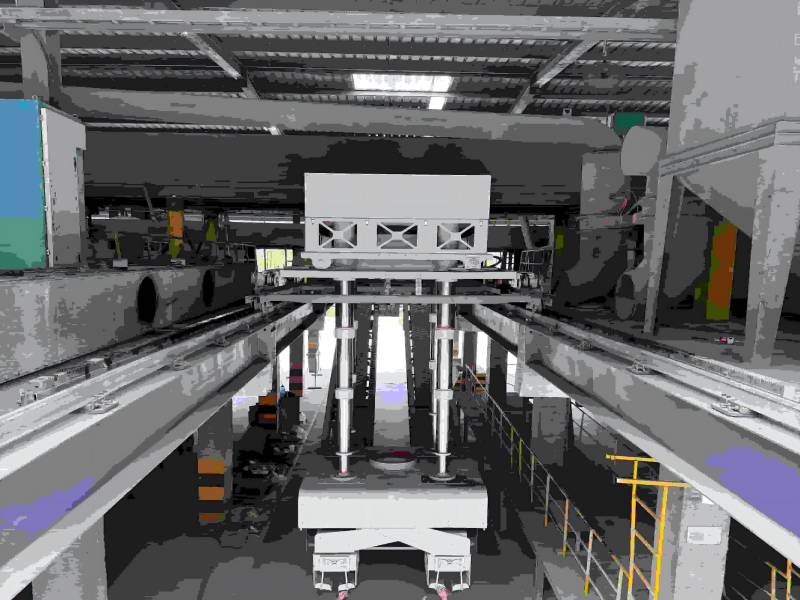
تأثير التطبيق:
كما يتضح من نتائج التحميل بعد استخدام شركتنا للرافعة الآلية، فقد أكملت هذه الرافعة بنية المنصة السحابية للرافعة الذكية، محققةً بذلك التكامل بين المنصة المحلية والمنصة السحابية، بالإضافة إلى خدمة التحميل عن بُعد الذكية ومشاركة البيانات. وبذلك، لا يقتصر الأمر على قدرة المستخدم على حل أعطال الرافعة في الموقع، بل يمكن للشركة المصنعة أيضًا حل المشكلات التقنية التي قد يواجهها المستخدمون أثناء الاستخدام عن بُعد وبسرعة.


تمتلك مجموعة Gachn العديد من التقنيات الحاصلة على براءات اختراع في مجال آلات تعبئة وتحميل الأسمنت المعبأ في أكياس.
تقنية التحميل المجزأ الخاصة بشركة Gachn-JEENAR: تحل بشكل فعال مشكلة تحميل المركبات الطويلة جدًا.

لا تحتاج آلة تعبئة وتحميل الأسمنت الأوتوماتيكية من نوع Ganchn-JEENAR إلا إلى صيانة مريحة، مما يقلل من تكلفة ووقت الصيانة.
تتميز آلة تعبئة وتحميل الأسمنت المعبأ في أكياس من GACHN-JEENAR بقدرة تكيف واسعة: فهي تتعامل بسهولة مع جميع أنواع الشاحنات، بما في ذلك نماذج السكك الحديدية العالية.

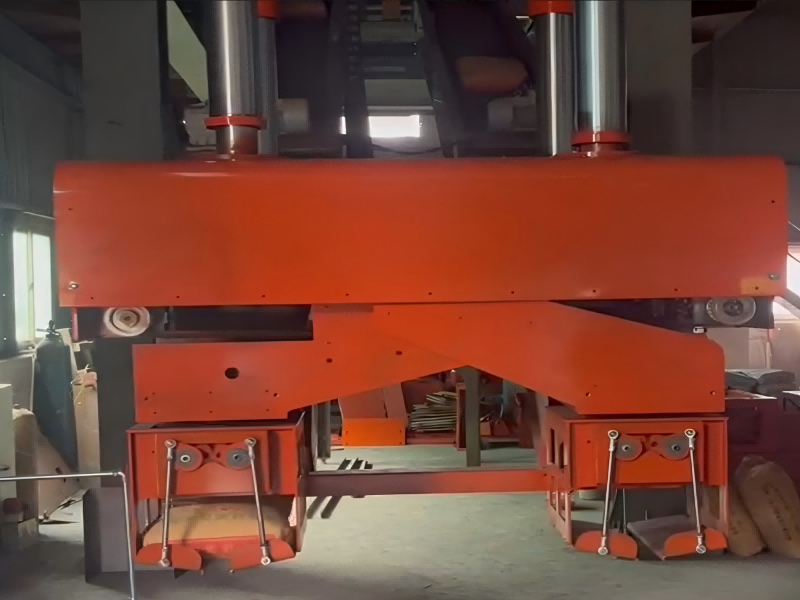
يمكن تمديد رأس آلة نظام تحميل الأسمنت المعبأ في أكياس أوتوماتيكية من مجموعة Gachn إلى العربة لتكديس الأكياس في وضع منخفض، مما يقلل من الغبار وتمزق الأكياس.
تتميز آلة التعبئة والتغليف والتحميل من Gachn بتفاعل البيانات في الوقت الفعلي: بالاعتماد على تقنية إنترنت الأشياء لتحقيق جمع البيانات وتحليلها في الوقت الفعلي.
المسح ثلاثي الأبعاد لنظام التحميل الآلي للأسمنت المعبأ في أكياس لجميع أنواع المركبات.
تصميم رأس التعبئة المزدوج من Gachn-JEENAR: حركة جانبية حرة، بالقرب من العربة للتعبئة.
اشترك للحصول على آخر الأخبار. ابقَ على اطلاع بأحدث التوجهات.
 IPv6 الشبكة المدعومة 闽ICP备20010238号-3
IPv6 الشبكة المدعومة 闽ICP备20010238号-3